تنظیمات درایو برای اتصال به Profibus
تنظیمات درایو برای اتصال به Profibus : در كنترل درايو از طريق
پروفي باس با دو پارامتر اصلي با عنوان Control Word و Status Word سروكار داريم:
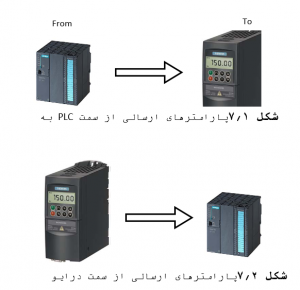
- Control Word: كه به اختصار CW يا CTW نيز گفته مي شود، فرمان هايي است كه از سمت PLC براي درايو ارسال مي شود، مانند فرمان On/Off و رفرنس سرعت.
- Status Word: كه به اختصار SW يا STW نيز گفته مي شود، اطلاعاتي است كه از سمت درايو براي PLC ارسال مي شود، مانند اطلاعات وضعيت درايو و مقدار سرعت واقعي.
PLC
براساس تنظيماتي كه در سمت نرم افزار PLC انجام مي شود،
ميزان CW و SW مي تواند حالت هاي مختلفي داشته باشد.
اين تنظيمات براساس پارامتري با عنوان PPO
(مخفف Parameter Process Object) صورت مي گيرد.
تنظيم PPO براي همة انواع درايوها كه به شبكة پروفي
باس متصل مي شوند وجود دارد. PPOداراي
حالت هاي مختلفي است، از PPo1 تا PPO5 در هر
حالت تعداد Word مربوط به Status يا Control متفاوت است
. شكل 3. 7 PPOهاي مختلف را نشان مي دهد.
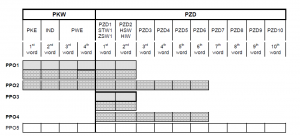
همان طور كه در اين شكل ديده مي شود،
PPO از دو بخش PKW و PZD تشكيل شده است.
اين دو مخفف دو كلمة آلماني زير هستند:
- Parameter- Kennung- Wert: PKW
- Prozess datenbereich: PZD
PKW براي پارامترهاي درايو استفاده مي شود
و توسط آن دسترسي به پارامترهاي درايو براي
خواندن يا نوشتن از طريق پروفي باس وجود دارد.
به عنوان مثال مي توان فالت هاي درايو را مانيتور
كرد يا حدود بالا و پايين تعريف شده براي برخي پارامترهاي درايو را تغيير داد.
در شكل 3. 7 ديده مي شود كه اگر از PKW استفاده شود
حداقل Word 4 مورد نياز خواهد بود.دو Word اول شماره ی
ID و Index مربوط به پارامتر درایو را بر اساس اطلاعات سازنده
تعیین می کند و دو Word آخر، مربوط به مقادير
مورد نظر براي پارامترهاست كه خوانده يا نوشته مي شود.
استفاده از PKW در كنترل درايو از طريق پروفي باس الزامي نيست،
اگر هدف فقط اعمال فرمان و مقدار سرعت مرجع به درايو باشد
مي توان ازPPOهايي كه PKW ندارند نيز استفاده كرد.
به عنوان مثال با PPO3 و PPO4 نيز مي توان به راحتي
درايو را كنترل كرد و اطلاعات مهم آن را خواند. براي
اين دو PPO همان طور كه در شكل 3. 7 ديده مي شود، PKW وجود ندارد.
PZD
PZD براي Process Data كاربرد دارد. در PZD هيچ پارامتري
از درايو وجود ندارد ولي ديتاهاي مربوط به سرعت و وضعيت و…
كه مورد نياز سيستم كنترل است قابل دسترس مي باشند.
به عبارت ديگر Control Word و Status Word براي نيازهاي
ضروري در دسترس هستند ولي پارامترهاي درايو در دسترس نيستند.
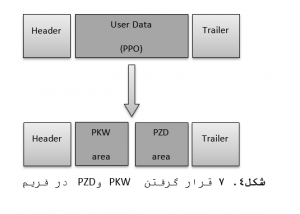
لازم است توجه شود كه PKW و PZD در فريم ارسال و دريافت پروفي
باس لحاظ مي شوند اين مطلب در شكل4. 7 ديده مي شود .
همان طور كه مشخص است، اگر از تنظيماتي نظير PPO5 استفاده شود
اگر چه امكان دسترسي به اطلاعات زيادي از درايو وجود دارد
ولي بار شبكه بالاتر مي رود و دسترسي Master به درايوها
با تأخير بيشتري خواهد بود، از اين رو لازم است تنظيم PPO
به صورت بهينه و در حد نياز استفاده شود. در بسياري از كاربردها
مي بينيم كه تنظيم به صورت PPO3 كه حداقل اطلاعات لازم را
براي كنترل كردن درايو و نشان دادن وضعيت آن دارد، استفاده مي شود.
با استفاده از PZD بدون PKW پاسخ ها در حد 20 ميلي ثانيه تأخير دارند.
با به كارگيري PZD و PKW اين تاخير به حدود 50 ميلي ثانيه مي رسد.
در PZD دو Word اول بسيار مهم هستند، اگر اولي
را PZD1 و دومي را PZD2 بناميم، كاربرد آنها به صورت زير خواهد بود:
- در Control Word از PZD1 براي ارسال فرمان هاي كنترلي به درايو استفاده مي شود.
- در Control word از PZD2 براي ارسال مقدار سرعت مبنا به درايو استفاده مي شود.
- در Status Word از PZD1 براي دريافت وضعيت درايو استفاده مي شود.
- در Status Work از PZD2براي دريافت مقدار سرعت واقعي درايو استفاده مي شود.
بيت هاي كنترلي PZD1 يا Control Word 1
براي تمام PPO هاي 1 تا 5، بيت هاي كنترلي درايو در اولين Word
مربوط به PZD كه اصطلاحاً PZD1 ناميده مي شود قرار دارند.
نمونة اين بيت ها براي يك مدل از درايوها در جدول 1. 7 ليست شده است.
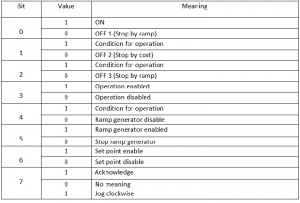
آنچه در اين جدول ذكر شده، ممكن است براي درايوهاي سازندگان
مختلف متفاوت باشد، از اين رو براي استفاده از آنها بايد به مدرك
سازنده مراجعه كرد. با اين وجود در بسياري از درايوها 8 بيت اول
داراي همان عملكردي هستند كه در جدول 8. 4 آمده، ولي بيت
هاي بعدي ممكن است براي درايوهاي مختلف متفاوت باشد.
به عنوان مثال در برخي از درايوها براي تغيير جهت چرخش
از بيت 14 و در برخي درايوها از بيت11 استفاده مي كنند،
به هرحال بررسي منوآل درايو قبل از تنظيم و برنامه نويسي اجتناب ناپذير است.
اگر درايوي كه پارامترهايش طبق جدول 8. 4 است
را در نظر بگيريم، با توجه به وضعيت بيت ها
و با توجه به جدول 9. 4 نكات زير قابل توجه هستند:
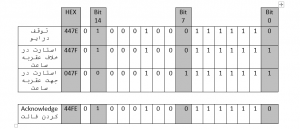
- بيت هاي آزاد (Free) چه يك باشند و چه صفر تأثيري در كنترل ندارند.
- اگر عدد هگز 447Eرا روي PZD1بريزيم، درايو با شيب تعريف شده متوقف مي شود.
- اگر عدد هگز 447D را روي PZD1 بريزيم، درايو فوراً متوقف مي شود.
- اگر عدد هگز 447F را روي يك PZD1 بريزيم درايو استارت مي شود
چون بيت 0 يك شده و چرخش در جهت عقربه ساعت خواهد بود زيرا بيت 14 يك شده است.
- اگر عدد هگز 047Fرا روي PZD1 بريزيم، درايو استارت مي شود چون بيت 0
يك شده و چرخش خلاف عقربه ساعت خواهد بود، زيرا بيت 14 صفر شده است.
- Bit 1 و Bit 2 براي Emergency Stop استفاده مي شوند. Bit1براي Stopسريع
و Bit2 براي Stopسريع با توجه به شيب تعيين شده براي
Decelerationبه كار مي رود. اين بيت ها اگر صفر شوند حالت ترمز سريع فعال مي شود.
- Bit 3 براي فرمان آمادگي درايو به كار مي رود و به طور نرمال بايد يك باشد.
- Bit 4 و Bit 5 مي توانند تعيين كنند كه مقدار مبنا به صورت
Ramp به درايو اعمال شود يا خير. به طور نرمال اين بيت ها يك هستند.
- Bit 6 براي فعال سازي Set point به كار مي رود و به طور نرمال بايد يك باشد.
- Bit 7 براي ريست كردن فالت درايو به كار مي رود. اگر درايو فالت
داشته باشد و فرمان نگيرد براي Acknowledge كردن فالت بايد
Bit 7 را يك كرده و به صفر برگردانيم، بنابراين مي توانيم
اعداد هگز 44FE و 447E را مانند جدول فوق به ترتيب به PZD1 ارسال كنيم.
- Bit 8 و Bit 9 براي فرمان Jog به كار مي روند.
- Bit 10 براي فعال سازي فرمان PZD از طريق پروفي باس به كار مي رود و به طور نرمال بايد يك باشد.
بيت هاي كنترلي PZD2 يا Control Word2
براي تمام PPO هاي 1 تا 5 دومين Word مربوط
به PZD كه اصطلاحاً PZD2 خوانده مي شود،
براي اعمال Set point سرعت به درايو به كار مي رود.
معمولاً اين Word در تمام درايوها براي همين منظور استفاده مي شود.
اگر Scale مربوط به Setpoint درايو بين 0 تا 100 درصد باشد
در اين صورت عدد 4000Hex معادل دور مبناي فركانس
نامي مانند 50Hz خواهد بود. عدد 4000Hex معادل 16384
دسيمال است، بنابراين اگر كاربرد بخواهد مقدار مبنا
را به صورت Hz وارد كند بايد برنامه كوچكي بنويسيد.
اگر فركانس نامي 50 هرتز باشد و كاربر فركانس
دلخواه را به صورت متغير Fوارد كند، بايد رابطه زير را در برنامه به كار ببرد:
PZD2 = 16384*F/50
بيت هاي وضعيت PZD1 يا Status Word1
اين بيت ها وضعيت هاي مختلفي را از درايو برمي گردانند.
جدول 2. 7 نمونة آنها را براي درايوي كه Control Word
آن در جدول 7.1قبلي ذكر شد نشان مي دهد.
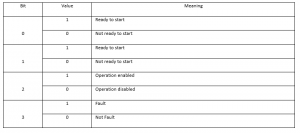
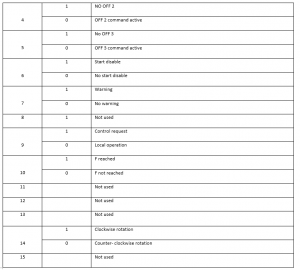
مي توان بيت دلخواه از اين Work را جدا كرد و در سيستم مانيتورينگ نمايش داد.
بيت هاي وضعيت PZD2 يا Status Word2
براي تمام PPO ها دومين Word مربوط به STW نشانگر مقدار
سرعت واقعي است و اين موضوع به طور معمول براي اكثر
درايوها صادق است. اين مقدار بين صفر تا عدد
4000Hez نشان داده مي شود. اگر كاربر بخواهد
آن را به صورت فركانس ببيند و فركانس نامي 50 هرتزباشد،
لازم است رابطة زير را در برنامه به كار ببرد:
F= PZD2 * 50/16384
ساير PZDها
در PPO2، PPO4 و PPO5 تعداد PZDها بيشتر
از دو Word است و از آنها مي توان اطلاعات
بيشترين در مورد درايو گرفت. به موارد زير توجه كنيد:
- در درايو AC علاوه بر فيدبك سرعت مي توان فيدبك جريان درايو توسط PZD3 را دريافت كرد. به عنوان مثال اگر براي درايو Micromaster 440 گزينة PPO2 را انتخاب كنيم PZD ها به صورت جدول 3. 7 خواهند بود.

- در درايو DC علاوه بر فيدبك سرعت مي توان فيدبك جريان آرميچر و فيدبك جريان فيلد و فيدبك ولتاژ آرميچر را نيز دريافت كرد.
PKW
PKW براي خواندن و نوشتن پارامترهاي درايو به كار مي رود.
خواندن و نوشتن پارامترهاي درايو با استفاده از PKW
همان طور كه قبلاً اشاره شد، PKW براي خواندن و نوشتن
پارامترهاي درايو به كار مي رود كه با ديتاهاي
فرايندي PZD متفاوت است. به عنوان مثال اگر لازم باشد
كه پارامتر P1082 درايو Micromaster را از طريق شبكه بخوانيم
يا آن را روي مقدار مورد نظر تنظيم كنيم در اين حالت
بايد از PKW استفاده كنيم. PKW همواره به صورت Word 4 است
كه در PPO1، PPO2 و PPO5 وجود دارد، بنابراين پيش نياز
كار با آن اين است كه درايو اين PPOها را ساپورت كند و
يكي از اين تنظيمات را در پيكربندي لحاظ كرده باشيم.
اين ساختار از 4 بخش كه هر كدام به صورت يك Word هستند، تشكيل شده است.
- PKE: يا Parameter Identifier يك Word است كه به پارامتر مورد نظر و نوع كاري كه بايد انجام شود اشاره مي كند.
- IND: يا Index يك Word است و شمارة ايندكس مربوط به پارامتر را مشخص مي كند.
- PWE1 و PWE2: يا Parameter Value هر كدام يك Word هستند كه ديتايي كه بايد روي درايو نوشته شود در آنها قرار مي گيرند.
PKE از دو بخش تشكيل شده است:
- AK كه ID مربوط به درخواست يا پاسخ است و در بيت هاي 12 تا 15 قرار مي گيرد.
- PNU كه مربوط به شمارة پارامتر است و در بيت هاي0 تا 10قرار مي گيرد.
بيت 11 همواره صفر است.
فرض كنيد كه Master مي خواهد از درايو پارامتر P1082 را درخواست كند.
در اين شرايط عدد43A هگز كه معادل 1082 است در PNU مي نشيند
و چون نوع عمل خواندن است، عدد1در AK وارد مي شود.
بنابراين عدد 143A در ورد اول PKW يعني در PKE داده مي شود.
ولي اگر نوع عمل نوشتن يك مقدار Realباشد، AK
بايد 3وارد شود و كد درخواست به صورت 343A خواهد بود.
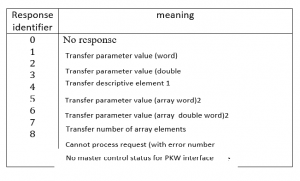
در جواب درايو به Master كه درخواستي PNU تكرار مي شود
ولي AK طبق جدول 5. 7 متفاوت است. مثلاً اگر براي فرمان
نوشتن 343A در پاسخ 243Aبرگردد يعني دستور به درستي
اجرا شده است، ولي اگر در AK عدد 7 ظاهر شود يعني
كد 743A برگردد، به اين معني است كه دستور اجرا نشده است.
عددهاي مختلف براي AK در شرايط درخواست Master به صورت جدول 4. 7است.